GRAPHS TRAVERSALS 2
2025-11-19
Recall Minimum Spanning Tree
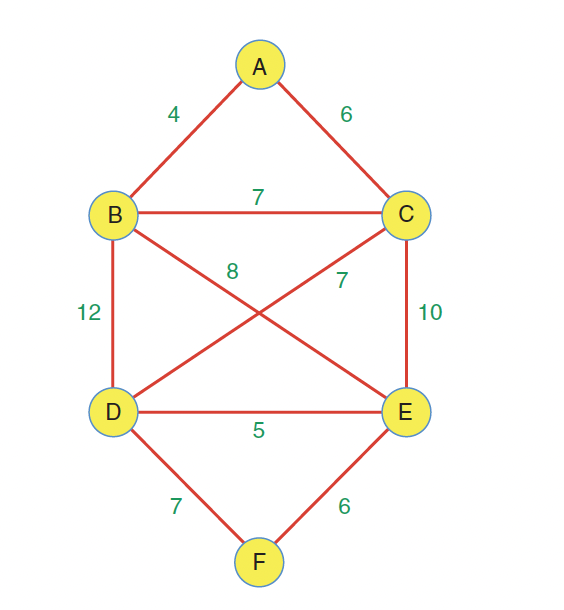
Here is a weighted graph with six vertices. Each edge has a weight, shown by a number alongside the edge.
![]()
How can you pick a subgraph that minimizes the cost of connecting vertices into a network?
Recall Minimum Spanning Tree
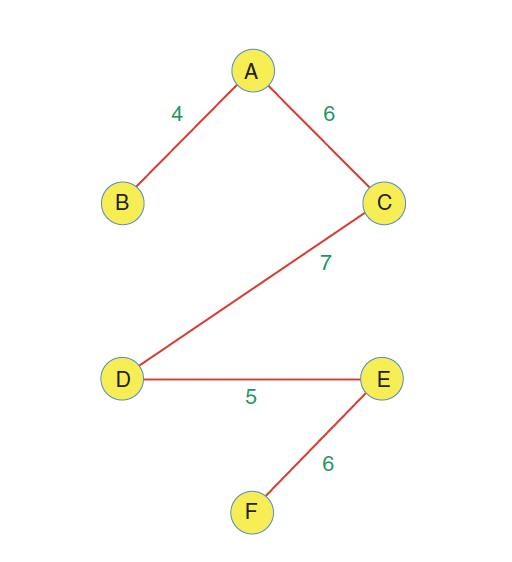
The MST for the graph above
![]()
The minimum spanning tree consists of the edges
AB,AC,CD,DE, andEF, for a total edge weight of28The order in which the edges are specified is unimportant.
Dijkstra’s Algorithm: Initialization Step
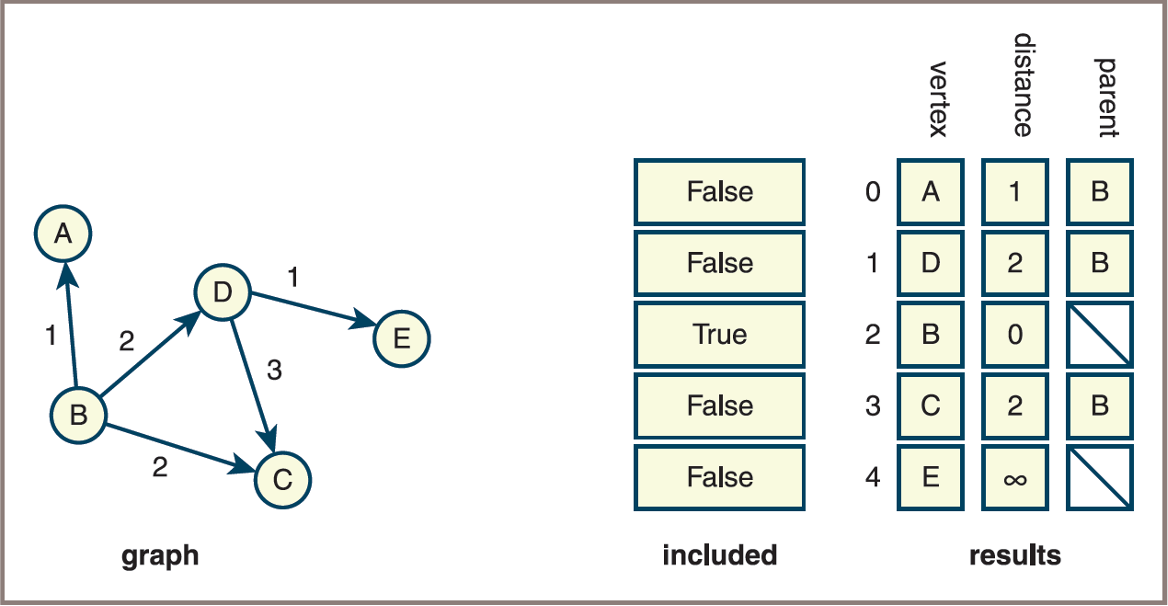
A graph and the initial state of the data structures used to compute the shortest paths from a given vertex
![]()
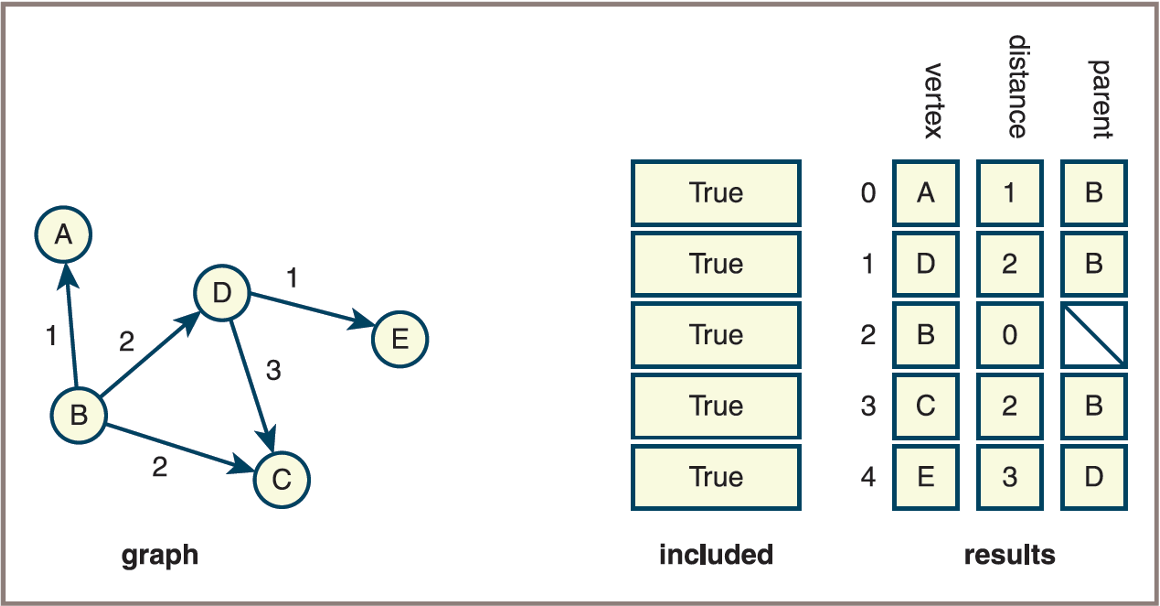
Dijkstra’s Algorithm: Computation Step
- A graph and the final state of the data structures used to compute the shortest paths from a given vertex
![]()
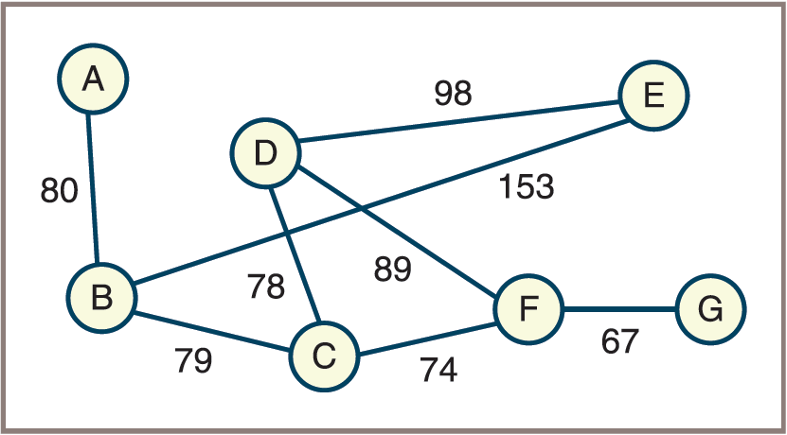
Floyd’s Algorithm
For each vertex v in a graph, the algorithm finds the shortest path from vertex v to any other vertex w that is reachable from v
Consider the weighted graph in this Figure
![]()
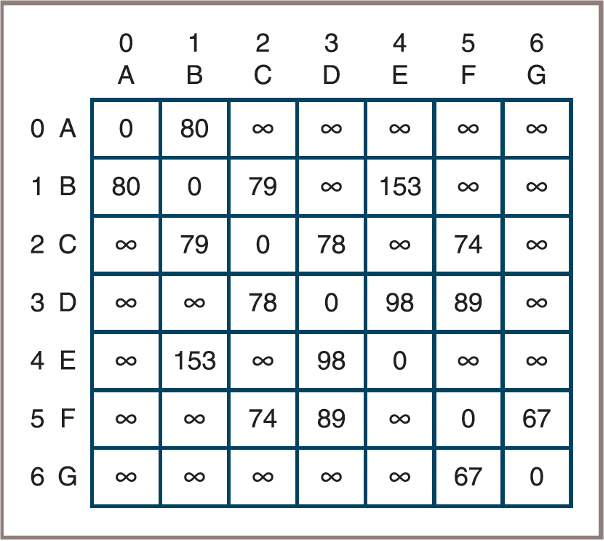
Floyd’s Algorithm: In a preprocessing step
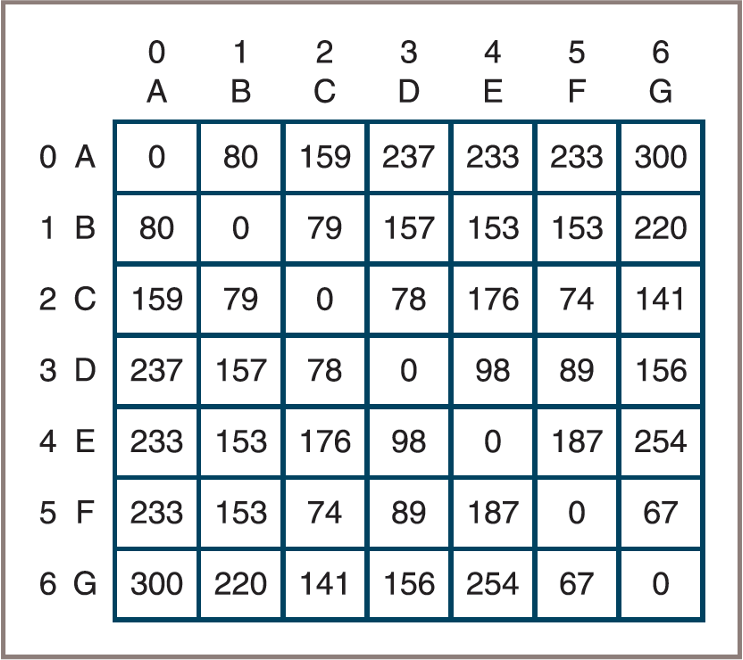
Using the figure above, you will build an initial distance matrix whose cells contain the weights on the edges that connect each vertex with its neighbors
![]()
Floyd’s Algorithm: Computational step
Using the figure above, here is the modified distance matrix:
![]()